ΩÃÜT§ŒΩBΩÈ

KAWAMURA Takeshi
—–æø’þ«ÈàÛ
-
ѧλ
≤© ø(π§—ß)
-
µ£µ± ⁄òIø∆ƒø
•Ì•Ð•√•»π§—ߣ¨•∑•π•∆•ý÷∆”˘£¨«ÈàÛ????????????????æt∫œπ§—ßI£¨«ÈàÛ????????????????æt∫œπ§—ßII£¨«ÈàÛ????????????????π§—ß∏≈’죨«ÈàÛÕ®–≈ ˝—ߣ¨µÿ”ÚŒ¥¿¥•«•∂•§•Ûπ§—ß»ÎÈT
-
åüÈT∑÷“∞
÷∆”˘π§—ß
-
—–æø•∆©`•Þ
÷∆”˘œµ§Œ•Ì•–•π•»∞≤∂®–‘Ω‚Œˆ£¨∑«æÄ–Œ÷∆”˘£¨•Ì•Ð•√•»π§—ߣ¨∏þ∂»µ¿¬∑ΩªÕ®•∑•π•∆•ý(ITS)
-
—–æøƒ⁄»ð•≠©`•Ô©`•…
•Ì•–•π•»∞≤∂®£¨«¯Èg•—•È•·©`•ø£¨Ög’{–‘£¨RF-ID •∑•π•∆•ý
-
À˘ ٗߪ·
Îäöð—ߪ·£¨”ãúy◊‘Ñ”÷∆”˘—ߪ·£¨•∑•π•∆•ý÷∆”˘«Èàۗߪ·£¨•Ì•Ð•√•»—ߪ·£¨ITS°°Japan£¨√◊π˙ÎäöðÎä◊”—ߪ·£®IEEE£©
—–æø “§Œ∏≈“™
§≥§Œ—–æø “§«§œ°¢•Ì•Ð•√•»?÷∆”˘°¢ITS(Intelligent Transport System: ∏þ∂»µ¿¬∑ΩªÕ®•∑•π•∆•ý)§ÀÈv§π§Î—–æø§Ú§∑§∆§§§Þ§π°£
•Ì•Ð•√•»?÷∆”˘∑÷“∞§«§œ°¢∆’Õ®§ŒÐáðܧŒ¥˙§Ô§Í§À•¥•ý«Ú§ÚÒlÑ”ðܧÀ§∑§∆§§§Î∂¿◊‘§Œ«ÚðÜ◊∞ljÐáÅI§Úøº§®°¢»À§¨Å\Ðáø…ƒÐ§ ÐáÅI§«ågÚY—–æø§Ú§∑§∆§§§Þ§π°£§€§´§À…≠¡÷π§—ߧ«–°–Õœ¬ÿ◊ôC§Œ◊˜òIÑø¬ œÚ…œ§Úƒø÷∏§∑§ø—–æø§‰–°–Õ§Œµ„åù≥∆–Õ§Œ4Ω≈öi––•Ì•Ð•√•»§Œöi––Ñ”◊˜§ §…§Œ—–æø§Ú§∑§∆§§§Þ§π°£
ITS∑÷“∞§«§œ°¢GPS§‰∞◊æÄ’J◊Rºº–g§Œ»ıµ„§Ú—a§¶§ø§·§À√Õ¥µ—©§Œ—©µ¿§Úþ\Ðû§«§≠§Îºº–g§Úøº§®§∆°¢RFID§Ú”√§§§øÐáÅI’TåߧŒ—–æø§Ú§∑§∆§§§Þ§π°£§≥§Ï§œ¥Û—ßòãƒ⁄§ŒågÚYæħ«◊‘Ñ”Ðá§Ú”√§§§∆◊þ––ågÚY§Ú––§√§∆§§§Þ§π°£§≥§Œ—–æø§ŒèÍ”√§»§∑§∆°¢ÃÏæƧÀRFID•ø•∞§Ú»°§Í∏∂§±§∆°¢Îä≤®≠hæ≥§Œêô§§Œðƒ⁄§«§‚öi––’þ§ŒŒª÷√§ÚÕ∆∂®§∑§∆’Tåߧπ§Î—–æø§Ú§∑§∆§§§Þ§π°£ågÚY”√ôC–µ?∆˜æþ§Œ‘O”ã÷∆◊˜§¿§±§«§œ§ §Ø°¢Ñ”§´§π§ø§·§Œ•◊•Ì•∞•È•ý§‚—–æø§∑§∆§§§Þ§π°£
—–æø “§Œ—–æø•∆©`•Þ
-
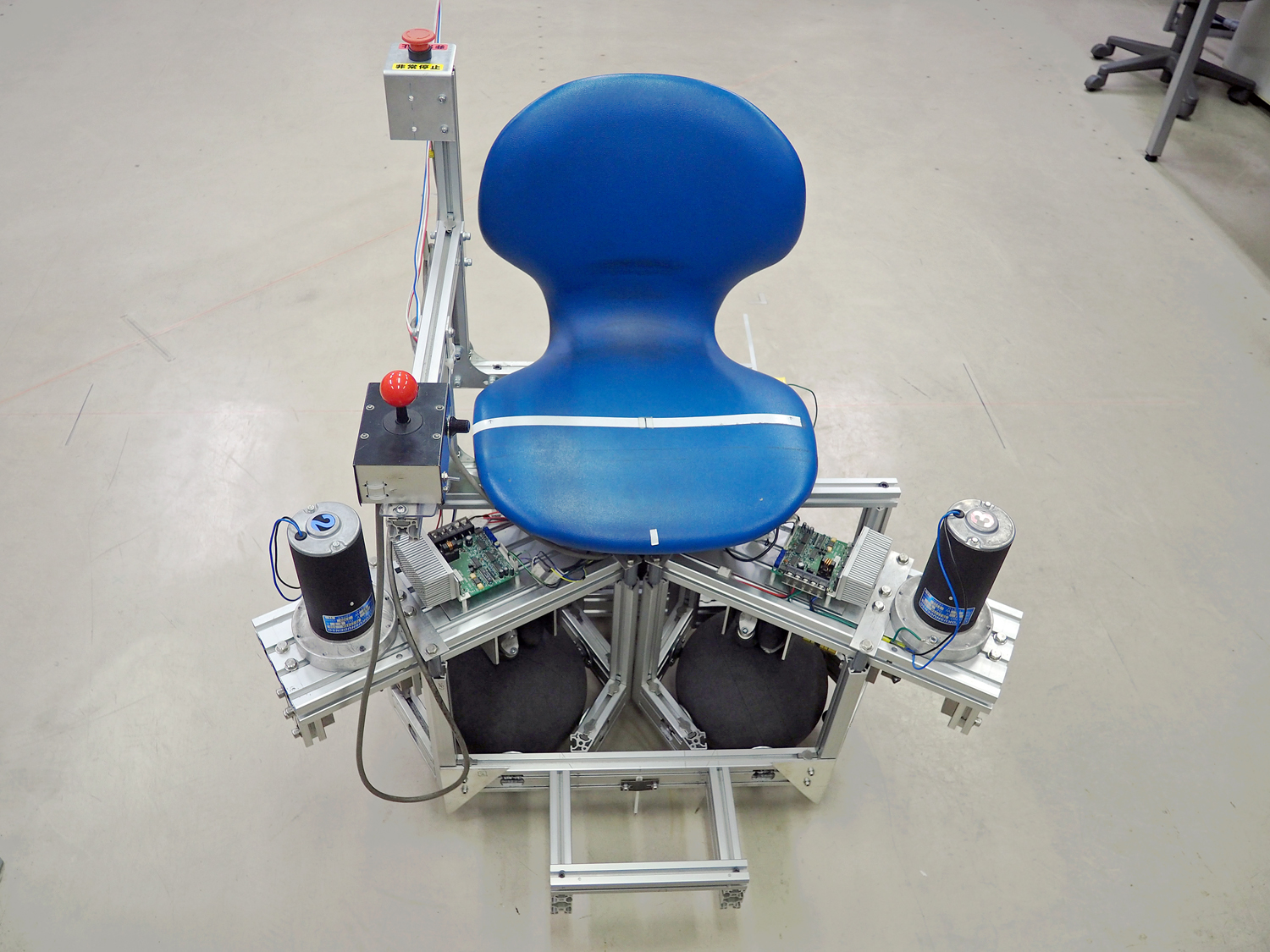
•Ì•Ð•√•»?÷∆”˘§ÀÈv§π§Î—–æø
§≥§Œ•∆©`•Þ§Œ—–æøåùœÛ§œ«ÚðÜÐáÅI°¢œ¬ÿ◊ôC§»4Ω≈öi––•Ì•Ð•√•»§¨§¢§Í§Þ§π°£«ÚðÜÐáÅI§œ¥ÓÅ\ø…ƒÐ§«ÒlÑ”ðÜ£®÷±æ∂24cm£©3§ƒ§À§Ë§ÎÒlÑ”•Ÿ•Ø•»•Î§Ú∫œ≥…§∑§∆¿Ì’ì…œ§œ»´∑ΩŒª§À“∆Ñ”§«§≠§Þ§π°£¨F‘⁄§œ…œœ¬◊Û”“–±§·4∑ΩœÚ§Œ∫œ”ã8∑ΩœÚ§»§Ω§Œàˆ§«◊Û”“§ÿ§Œ–˝ªÿ§¨§«§≠§Þ§π°£…≠¡÷π§—ߧ«§œ–°–ÕðX¡ø§ œ¬ÿ◊ôC§Œ◊˜òIÑø¬ œÚ…œ§Úƒø÷∏§∑§∆°¢ôCò㧌∏ƒ¡º§ §…§Ú§∑§∆§§§Þ§π°£–°–Õ4Ω≈öi––•Ì•Ð•√•»§œ»´∑ΩŒª“∆Ñ”§Úøk∫·°¢–±§·∑ΩœÚ§Œöi––§¨§«§≠§Þ§π°£
-

RFID§ŒITS£®∏þ∂»µ¿¬∑ΩªÕ®•∑•π•∆•ý£©èÍ”√µ»
RFID§œRadio Frequency Identifier§Œ¬‘§«±»ð^µƒΩ¸§§æýÎx§«•«©`•ø§ŒÀÕ Ð–≈§Ú§∑§Þ§π°£ITS£®∏þ∂»µ¿¬∑ΩªÕ®•∑•π•∆•ý£©§ÿ§ŒèÍ”√§œ°¢µ¿¬∑§ÀŒª÷√«ÈàÛ§ §…§Úﯧ≠Þz§Û§¿RFID•ø•∞§Ú¬Ò§·§∆°¢§≥§Ï§ÚÐáðd§Œ•¢•Û•∆• §«’i§þ»°§Í§Þ§π°£§≥§Ï§»∑ΩŒª«ÈàÛ§ §…§«ÐáÅI§Œ’Tåߧږ–§§§Þ§π°£»Àûȵƒ§ êô“ïΩÁÃıº˛œ¬§«◊‘Ñ”Ðá§Ú¥Û—ßòãƒ⁄§«◊þ§È§ª§∆§§§Þ§π°£Õ¨òî§ÀRFID•ø•∞§ÀŒª÷√«ÈàÛ§ §…§Úﯧ≠Þz§þ°¢§≥§Ï§ÚågÚY “§‰¿»œ¬§ŒÃÏæƧÀ»°§Í∏∂§±°¢–Øé°–Õ§ŒÀÕ Ð–≈ôC§«’i§þ»°§Í°¢öi––’þ§ŒŒª÷√Õ∆∂®°¢’TåߧÚågÚY§∑§∆§§§Þ§π°£